
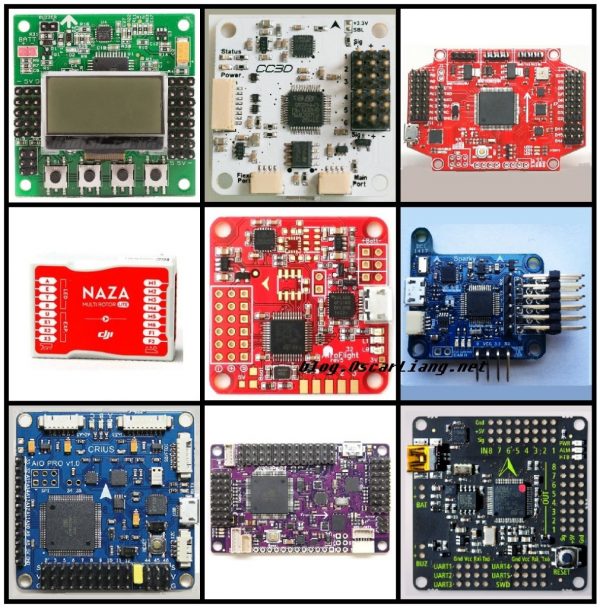
در این جلسه در مورد فلایت کنترلها خواهیم گفت. فلایت کنترل یعنی مغز پرنده؛ و پرواز یک پرنده بدون مغز تغریبا غیر ممکن است. فلایت کنترل یک قسمت جدانشدنی از پرندهها میباشد به عبارتی میتوان گفت که زمانی پهپادها رونق پیدا کرد که فلایت کنترلرها رونق پیدا کردند.

پرنده های بدون سرنشین از زمانی رشد کردند که الکترونیک دیجیتال رشد کرد. میتوان گفت که از زمانی که فلایت کنترلها، سیستمهای کنترل پرواز دقیقتری درست شد پرندههای بدون سرنشین نیز رشد کردند. هیچ ذهن انسانی توانایی کنترل دورهای موتور در سرعت های بسیار بالا در حدود ۱۰۰ کیلو وات و یا بیشتر را ندارد و این اتفاق فقط و فقط توسط سنسورها کنترل میشود. مجموعهای از این سنسورها در فلایت کنترلر جمعآوری شده است. قطعاً در تمام مقالات و یا سایتها شما خواندهاید که از فلایت کنترلر به عنوان مغز پرنده، نام میبرند و این یک اصطلاح کاملاً صحیح میباشد. ما اگر بخواهیم بدون فلایت کنترلر یک پرنده را هدایت کنیم، فقط میتوانیم بر روی یک موتور یا نهایتاً دو موتور تسلط کافی داشته باشیم. اما با وجود فلایت کنترلرها ما میتوانیم به چندین موتور یا به عبارت بهتر چند ده موتور کنترل داشته باشیم حتی بیشتر.
ما اگر بخواهیم بدون استفاده از فلایت کنترلر به یک پرنده دستور بدهیم فقط میتوانیم دستور کم و یا زیاد کردن دور موتور را به پرنده اعمال کنیم. درست است که فلایت کنترلر هم نیز چنین کاری انجام می دهد اما فلایت کنترلر با توجه به محاسباتی که انجام می دهد دور موتور را تنظیم میکند نه اینکه صرفاً به دستور تغیر جهت از طرف ما، دور موتور را تغیر دهد.
ما فقط میتوانیم چیزی را که میبینیم اعمال کنیم. مثلاً احساس میکنیم که سمت چپ پرندهی ما کمی پایینتر است یا سمت راست. ما میخواهیم که این اختلاف را در دور موتور جبران کنیم. مسلم است که رسیدن به یک تعادل دقیق نیازمند یک سری محاسبات دقیق ژیروسکوپی میباشد و با توجه به اینکه ما با نگاه کردن، تصمیم به اعمال تغیرات را میگیریم، این دستورات قطعاً نقصهای فراوان دارد.
فلایت کنترلر چگونه این کارها را انجام میدهد؟
ولتاژ مورد نیاز و جریان مورد نیاز تک تک موتورها به دستور مستقیم فلایت کنترلر به اسپید کنترلر، فراهم میشود. در یک فلایت کنترلر تعدادی سنسور ژیروسکوپ و شتاب سنج، ارتفاع سنج و GPS و… وجود دارد. متناسب با فلایت کنترل انتخابی قدرت تک تک سنسورها تغیر میکند. به عنوان مثال در فلایت کنترلرهای حرفهای، بهروزترین ژیروسکوپهای استفاده شده که شش محور میباشند و تغییرات در تمام جهتها را اندازه گیری میکنند، در حالی که در فلایت کنترلرهای استفاده شده در کوادهای اسباب بازی ژیروسکوپها از پایینترین کیفیت برخوردارند. در اینجا قصد توضیح دادن ژیروسکوپها را ندارم اما در همین حد میگویم که ژیروسکوپ میتواند جهت حرکت را تشخیص دهد به عنوان مثال شما یک گوی را در درون یک بشقاب تصور کنید با تغییر جهت بشقاب و یا تغییر تعادل بشقاب، گوی درون بشقاب نیز تغییر جهت میدهد. ژیروسکوپها نیز چنین مکانیسمی دارند. در ژیروسکوپهای پیشرفته به صورت تمام الکترونیکی توسط سنسورهای فوق حرفهای میتوان به راحتی کوچکترین تغییر و حرکت را تشخیص داد. تشخیص تغییر جهت توسط ژیروسکوپها و گزارش تغیرات به فلایت کنترل، باعث بهبود عملکرد پرواز میشود.
حال اگر فلایت کنترلر بر روی سطح صاف پرنده نصب شود و ژیروسکوپ آن تنظیم شود، به محض تغییر حتی به اندازه یک سانتی متر به یک جهت، ژیروسکوپ این تغییر را احساس میکند. اینجاست که فلایت کنترلر به راحتی میتواند این تغییر را احساس کرده و به موتور مربوطه دستور مورد نیاز را اعمال کند. مسلم است که در دید انسانی تغییرات یک سانتی متری به چشم نمیآید اما این تغییرات در فلایت کنترلر به راحتی محاسبه میشود. در دو جلسه قبل راجع به بالانسر پرنده صحبت کردم که برای اینکه فرمان پذیری پرنده راحتتر باشد بالانس بودن پرنده خیلی تاثیر گذار است. در فلایت کنترلرهای حرفه ای این امکان را برای ما فراهم میکند که اگر یکی از بازوهای ما سنگینتر از بازوهای دیگر باشد، میتواند با بالا بردن دور موتور آن بازو این عدم تعادل وزن را جبران کند. اما این بدین معنا نیست که تعادل در پرنده برای ما مهم نباشد، چرا که این عدم تعادل باعث فشار بر موتورها میشود. همانطور که در جلسات مربوط به ملخ ذکر شد، اگر حتی یکی از ملخهای ما شکستگی کوچکی داشته باشد، اینجاست که فلایت کنترل به کمک ما میآید و این اختلاف را جبران میکند. اما شکستگی ملخ منجر به صدمه زدن به موتور میشود. ولی به هر جهت این یکی از تواناییهای بزرگ فلایت کنترلر است. در جلسات آینده و در فیلمهای آتی این توانایی فلایت کنترل را حتما نشان خواهم داد.

وجود یک فلایت کنترلر بر روی یک پرنده باعث میشود که به ما توانایی کنترل عملیاتی پرنده را بدهد یعنی ما دستور مربوطه را اعمال میکنیم؛ پرنده به راست برود، به چپ برود، مستقیم برود، فرود بیاید و یا تیکآف کند و یا هر دستور دیگر. یعنی ما به هیچ کدام از موتورها به صورت مستقیم دستور نمیدهیم و این یعنی یک کنترل عملیاتی(فقط بر روی عملیات کنترل داریم) ما فقط از پرنده هدف نهایی را میخواهیم و کاری به فرآیند انجام آن دستورات نداریم.
فلایت کنترلرها به دستههای مبتدی، نیمه حرفهای و حرفهای تقسیم میشوند. فلایت کنترلرهای مبتدی همان فلایت کنترلرهای نصب شده بر روی کوادهای اسباب بازی ارزان قیمت هستند. این فلایت کنترلرها یکبار مصرف نمیباشند ولی تقریبا میتوان گفت که غیر قابل تعمیر هستند. فلایت کنترلرهای نیمه حرفهای به مانند فلایت کنترلرهای حرفهای سنسورهای مورد نیاز را دارند اما در فلایت کنترلرهای حرفهای از سنسورهای به مراتب قدرتمند تری استفاده شده است. همچنین فلایت کنترلرهای حرفهای دارای سنسور GPS نیز میباشند. کار کردن با فلایت کنترلرهای حرفهای بسیار آسان است. منظور از آسان بودن یعنی عملیات را آسان میکند و نه فرآیند انجام عملیات را. به عنوان مثال در این فلایت کنترلرها شما میتوانید پرنده را طوری برنامه ریزی کنید که اگر از محدوده رنج پروازی خارج شد پرنده به صورت خودکار به مکان پرواز بازگردد. در صورتیکه این امکان و یا این آپشن در فلایت کنترلرهای نیمه حرفهای وجود ندارد. از طرفی میتوان این فلایت کنترلرها را طوری برنامهریزی کرد که وارد محدودههای ممنوعه پروازی نشوند.

همچنین در مورد کوادهای ریس، فلایت کنترلرها به دو دسته تقسیم میشوند؛ فلایت کنترلرهای نیمه حرفهای و فلایت کنترلرهای تمام حرفهای. برای آغاز پروازهای ریس میتوان از فلایت کنترلرهای نیمه حرفهای استفاده کرد اما برای مسابقات سطح بالا الزاماً باید از فلایت کنترلرهای تمام حرفهای استفاده کرد چرا که اگر سطح فلایت کنترلر پایین باشد پرنده در مسابقات به راحتی کم می آورد.
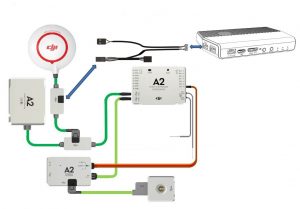
برای مصارف فیلم برداری و یا نقشه برداری وجود فلایت کنترلهای حرفهای الزامی است؛ چرا که باعث ثبات پرنده میشود. از معروفترین کمپانیهایی که در این زمینه بسیار حرفهای هستند میتوان به DJI اشاره کرد که مدل فلایت کنترل ما نیز از همین کمپانی است.

جمع بندی
فلایت کنترل یا مغز یک پرنده یک قسمت جدا نشدنی از پرندهها میباشد؛ طوری که رونق فلایت کنترلرها باعث رونق پهپادها گردید. تا آن زمان هیچ کس فکر نمیکرد که روزی میتوان برای تصویربرداری هوایی به جای استفاده از هلیکوپتر با آن هزینههای گزاف، از پرندههایی استفاده کرد که هزینههای آن در برابر یک پرواز هلیکوپتر تقریبا هیچ است. مباحث تخصصی و فنی حول فلایت کنترلر ها بسیار زیاد است چرا که از به روزترین مباحث دنیاست چه در زمینه نظامی و چه در زمینه غیرنظامی.
امیدوارم مطلب امروز مورد قبول دوستان عزیز واقع شده باشد.