
هر ربات پرنده یک سری تجهیزاتی داره که برای پرواز، این تجهیزات اجباریه و نبودشون عملا پرواز رو غیر ممکن میکنه؛ مثل فریم یا بدنه، موتور و ملخ، فلایت کنترل، اسپید کنترل، باتری و تجهیزات مربوط به هدایت از راه دور. در دومین قسمت از آموزشهای مربوط به ساخت ربات پرنده این مفاهیم رو با هم بررسی خواهیم کرد. در جلسات بعدی به صورت کامل روی هر کدوم بحث می کنیم. با ما همراه باشید.
نکات اولیه ساخت ربات پرنده
فریم یا بدنه
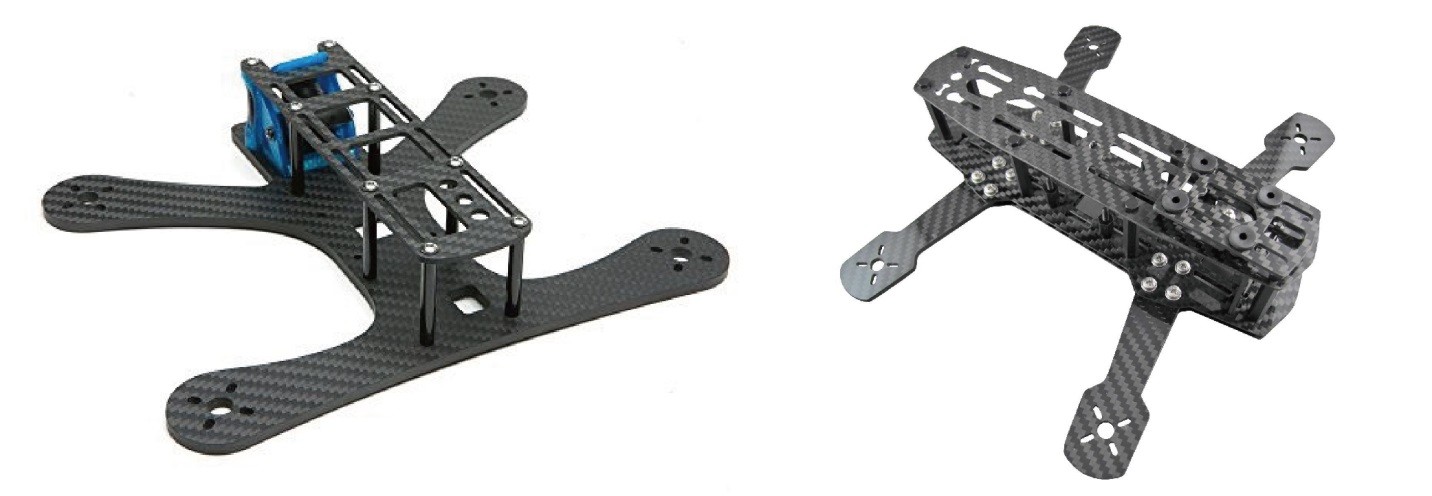
چند تا نکته است که برای یک مولتی روتور یا یک پهپاد ما اونها رو میدونیم: یک اینکه وزن برای ما خیلی مهمه دوم اینکه اگه ندونیم چه چیزی میخوایم بسازیم بین قطعاتی که وجود داره سردرگم میشیم چون برای ساخت بینهایت قطعه وجود داره.
خب پس حالا چرا بدنه؟؟؟ چون اگه ما فریممون رو انتخاب کنیم، توی انتخاب ملخ محدود میشیم. یعنی نمیتونیم هر ملخی رو نصب کنیم (مثلا نمیشه روی یک فریم که طولش 20 سانتی متره، 2 تا ملخ 12 سانتی نصب کرد). بنابراین اگه توی انتخاب ملخ محدود بشیم، در نتیجه توی انتخاب موتور هم محدود میشیم. این باعث میشه که دقیقا ملخ و موتور رو نسبت به فریممون انتخاب کنیم.

اگه ما قصد ساخت یک مولتی روتور رو داریم، خیلی خوبه که ابتدا بدونیم چی میخوایم بسازیم و به همه چیز فکر کنیم بعد دست به کار بشیم (یه زمانی میشد همینطوری رفت جلو اما الان با وجود این قیمت ها نه 🙂 پس بهتره خوب دقت کنیم).
همچنین میدونیم که روی بدنه یا فریم، قطعات نصب میشه برای همین اهمیت ویژهای داره. همچنین ممکنه که فریم بین قطعات سنگینترین قطعه باشه. پس باید برای ساخت ربات پرنده به صرفهترین گزینه رو انتخاب کنیم؛ یعنی نسبت به اون کارایی که داره انتخاب کنیم.
موتور و ملخ

همونطور که از اسمش مشخصه، وظیفهی تولید نیروی برا یا lift رو بر عهده داره که در قسمت مربوط به موتور راجع به این نیروها و عملکرد موتورها و نوع موتورها مفصل صحبت میشه. اما برای جلسهی اول همین کفایت میکنه که موتورهای این پرندهها از نوع براشلس هستند و با اعدادی که روشون هست شناسایی میشن.
فلایت کنترل یا کنترل کننده پرواز

خوب میشه گفت که مغز یک پرنده فلایت کنترله؛ تمام دستورات از فلایت کنترل صادر میشه و پرنده مجبور به اعمال دستورات میشه (قبلش بگم که دستورات رو ما صادر میکنیم؛ اما فلایت روش اجرا رو به سایر قسمت ها اعلام میکنه). فلایت کنترلها انواع خاصی دارند؛ مثلا شما میتونی پرنده رو به صورت اتوپایلوت از زمین بلند کنی و یا به صورت اتوپایلوت مجبور به نشستن کنی و خیلی کارهای دیگه. همچنین اگه از محدوده پروازی دور بشه میتونه پرنده رو به همون مکان اولیه برگردونه؛ مکانی که از اونجا بلند شده یا پرواز کرده.
اسپید کنترل یا ESC

ESC مخفف Electronic Speed Control به معنی کنترل سرعت الکترونیکی هست. وظیفه اسپید کنترل انجام دستورات صادر شده از سوی فلایت کنترل برای تمامی حرکات پرنده میباشد. به عنوان مثال فلایت کنترل دستور حرکت رو به جلو رو صادر میکنه، این وظیفهی اسپید کنترلرهاست که دور موتور رو تنظیم کنن. توضیح حرکات پرنده و انواع حرکات رو توی جلسات بعدی قطعاً عرض میکنیم، فعلا برای شناسایی قطعات همین اندازه کفایت میکنه.
باتری

باتری منبع انرژی و یکی از سنگینترین قطعات پرنده حساب میشه؛ به همین خاطر برای ساخت ربات پرنده انتخاب مناسب و درست این قطعه خیلی مهمه. نکتهای که باید برای انتخاب اون بهش دقت کنیم اینه که این انتخاب باید برحسب نیاز باشه. برای مطالعهی بیشتر در مورد باتریها میتونید آموزشهای مربوط به باتریها رو مطالعه کنید. البته ما در ادامهی آموزشهای ساخت ربات پرنده در این مورد صحبت میکنیم.
رادیو کنترل

تجهیزات رادیو کنترل برای کنترل از راه دور پهپاد می باشد و دنیایی از مباحث و اطلاعات درونش جایی میگیره و میشه گفت که یکی از تجهیزات گرون قیمته. میشه گفت رادیو کنترل یکی از تجهیزات پیشرفته به حساب میاد. در جلسات آینده به اندازهی نیاز در این مورد خواهیم کرد.
سیستم دید خلبان یا FPV

عبارت FPV مخفف first personal view هست؛ یعنی دید اول شخص خلبان که دوربینهای مختص خود به همراه فرستنده و گیرنده روی پرنده نصب میشه. از طرف دیگه خلبان پرنده یا به اصطلاح اپراتور از عینک fpv برای دیدن تصاویر اول شخص استفاده میکنه. البته هم میشه از عینکهای مربوطه استفاده کرد هم از LCDهای مربوط به این کار (تفاوت اصلیش با سایر نمایشگرها در آنتنشونه).

خب دوستان در این جلسه سعی شد تا با مفاهیم اولیه و مهمترین قطعاتی که برای ساخت ربات پرنده و البته به پرواز درآوردن اون لازمه ذکر بشه. البته قطعات دیگری هم روی پرندهها نصب میشه (مثل ضربهگیر فرود، دوربین ضبط تصاویر و…) ولی به این دلیل که توی این قسمت از آموزش ما فقط قصد داشتیم آشنایی بسیار مختصری با قطعات پیدا کنیم، در جلسات بعدی به صورت مفصل این موارد رو توضیح خواهیم داد.