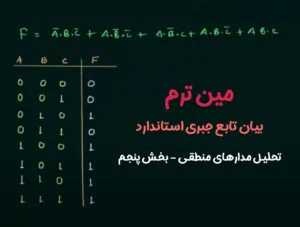
مینترم توابع جبری و ساده سازی توابع با نرم افزار | تحلیل مدارهای منطقی – بخش پنجم ادامه مطلب » محمد حسین بهاری پور 2021/09/13
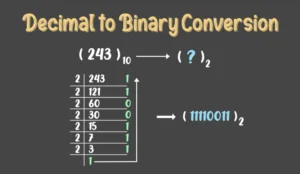
سیستم اعداد | سیستم Decimal ،Binary ،Octal و Hexadecimal | تحلیل مدارهای منطقی – بخش چهارم ادامه مطلب » محمد حسین بهاری پور 2021/08/05
بوت لودر avr و توابع آن در Atmel Studio | آموزش حرفهای AVR – بخش دوم ادامه مطلب » محمد نصر 2021/08/02
فایل hex چیست | خواندن فایل هگز از میکرو | آموزش حرفهای AVR – بخش اول ادامه مطلب » محمد نصر 2021/07/31
گیت های منطقی ترکیبی | گیت NAND ،NOR و XNOR | تحلیل مدارهای منطقی – بخش سوم ادامه مطلب » محمد حسین بهاری پور 2021/07/30
تبدیل pcb آلتیوم به pdf و خروجی 3D بردهای الکترونیکی | آموزش Altium Designer ادامه مطلب » محمد حسین بهاری پور 2021/07/20
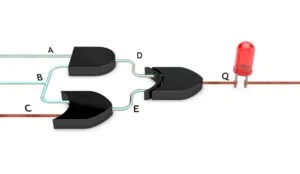
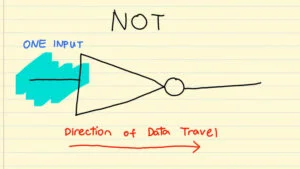
گیت های منطقی | گیت OR – گیت AND – گیت NOT | تحلیل مدارهای منطقی – بخش دوم ادامه مطلب » محمد حسین بهاری پور 2021/07/15
تفاوت آنالوگ و دیجیتال و سطوح ولتاژ مدارات منطقی | تحلیل مدارهای منطقی – بخش اول ادامه مطلب » محمد حسین بهاری پور 2021/07/14